
I. GIỚI THIỆU
Máy in 3D và công nghệ 3D đã rất phổ biến trên thế giới. Tại Việt Nam, công nghệ này cũng đang bắt phát triển nhanh. Các bạn ấp ủ trong người muốn có 1 máy thì bài viết này sẽ hướng dẫn các bạn thực hiện điều đó
II. CÁC BƯỚC CHÍNH CỦA DỰ ÁN
- Tìm kiếm thông tin, định hình ý tưởng
- Tìm mua các chi tiết
- Tạo hình các chi tiết cần in 3D và in
- Dựng phần cứng của máy
- Test 3 trục và hiệu chỉnh máy
- Hiệu chỉnh phần mềm và test tổng thể máy in
III. TÌM KIẾM THÔNG TIN, TÀI LIỆU VÀ LÊN Ý TƯỞNG CHO MÁY IN 3D
Đây là phần khá quan trọng trong quá trình làm máy in 3D. Việc đầu tiên chúng ta cần làm đó là tìm hiểu xem máy in 3D, công nghệ in 3D là gì. Mình đã dành một khoảng thời gian là 2 tuần tìm kiếm các thông tin, các bài viết liên quan trên internet. Một điểm may mắn cho mình là mình có một anh bạn đã chế tạo thành công máy in 3D, vì vậy mọi thắc mắc của mình đều được giải đáp nhanh chóng, thêm vào đó lại có điều kiện trực quan tìm hiểu cấu tạo, cách làm việc của máy in 3D. Và qua Cộng đồng Arduino, mình xin gửi gắm đến các bạn quá trình mình làm để các bạn có mong muốn tự làm máy in 3d có thể hoàn thiện một cái cho riêng mình.
Bước thứ hai trong công đoạn này đó là định hình phần cứng máy in mà chúng ta sẽ làm. Công việc chúng ta cần làm là đút rút từ các hình mẫu máy in mà ta đã tham khảo để tìm ra một kết cấu máy in phù hợp với bạn. Với mình thì, mình ban đầu dựa theo mẫu thiết kế máy in của bạn này: http://www.instructables.com/id/Cherry-60-3D-Printer/?ALLSTEPS Mẫu máy in này kết cấu đơn giản, và đặc biệt là rất rẻ. Tác giả đã chi ra khoảng 60-80 USD cho chiếc máy in này. Mình đã thay đổi một chút trong thiết kế của bạn ấy. Bạn ấy sử dụng động cơ bước loại 28BYJ-48 còn mình sử dụng loại NEMA 17HS2401. Máy của tác giả có không gian in là 10x10x10 cm, còn mình muốn tối thiểu là 15x15x15 cm.
IV. TÌM MUA CÁC CHI TIẾT, LINH KIỆN
Sau khi đã định hình được kết cấu của máy, chúng ta bắt đầu tìm và mua các chi tiết cơ khí, linh kiện điện tử cần thiết phù hợp với máy. (Ở mục này mình chỉ xin chia sẻ những thứ mình cần theo ý tưởng của mình, các bạn có thể tận dụng được nhiều thứ đồ cũ để làm thì sẽ tiết kiệm được hơn). (Tất cả giá đều là đơn vị USD).
_Nhôm định hình 20x20
(mm): 2 cây 460mm, 4 cây 385mm, 2 cây 150mm.
_Ốc M5 150 cái, ốc M3
70 cái.
_Con trượt M5 150 cái, con trượt M3 70 cái
_Các linh kiện nhựa cần
cho ráp máy.
_ Thanh ty tròn và ty
ren có ø=8
_ Ty trượt vuông
_ Động cơ bước step 1.8
2A (5 cái)
_ Đồ gá động cơ bước
thép 2 cái
_ Mặc đạn 4 cái
_ Linh kiện nhựa trục x,
y, z.
_ Mạch Arduino MEGA 2560 (1 cái)_ Ramp 1.4 (1 cái)
_ Driver A4988 (4 cái)
_ Nguồn 12V-7.5A (1 cái)
_ Công tắc hành trình Endstop (3 cái)
_ Màn hình LCD128 (1 cái)
_ Bộ Jhead và bộ đùn nhựa MK8 (1 cái)
_ Dây điện lõi 4 sợi 0.2mm (3m)
_ Lò xo canh bàn trục X, Y (4) và lò xo căng đai (2 cái)
_ Dây Cura GT2 (2m)
_ Mica 28mm x 28mm (8 li) và kiếng 28mm x 28mm (5 li)
_ Ốc bướm (4 con M5, 1 con M3)
V. THIẾT KẾ PHẦN CỨNG
+ Chuẩn bị

Hình: Máy khoan cầm tay, bộ taro, bộ lục giác

Hình 3.2: Nhôm định hình 20x20(mm)
B1: Khoan 2 cây 460mm theo hình 3.2 bằng mũi khoan 5li.
Sau đó dùng bộ taro để tạo ren cho thanh nhôm.
• Lưu ý phải để mũi taro vuông góc với nhôm dể tránh trường hợp ren không đều. Dùng mũi taro 5li để tạo taro

Hình 3.3. Đặt quay tay taro vuông góc với nhôm
• Lưu ý: khi tạo ren xong nhớ vệ sinh mũi taro trước khi tạo ren cho thanh nhôm tiếp theo.
B2: Xác định các vị trí cần lắp linh kiện nhựa cho máy(các linh kiện nhựa bạn có thể in ở các cửa hàng in 3D hoặc đặt trên các diễn đàn về in 3D. )


Hình 3.5: chuẩn bị lắp linh kiện nhựa
B3: Đánh dấu các thanh nhôm theo thứ tự để tính toán lắp con trượt M5 và M3
HÌnh 3.6: Thanh nhôm đã được đánh dấu
Tiếp theo, dùng giấy viết ghi lại những chỗ cần gắn con trượt đã tính toán ban đầu để tránh nhầm lẫn và quên các vị trí.
B4: Dùng ốc M5 và bù long để ghép các thanh nhôm thành khung và linh kiện nhựa để lắp

Hình 3.8: Khung nhôm dưới đã lắp con trượt và linh kiện nhựa chân dưới

Hình 3.9: Lắp đúng vị trí linh kiên nhựa chân dưới theo hình
B5: Dùng 4 thanh nhôm 385mm, 2 thanh nhôm 460mm và các linh kiện nhựa khung đứng để dựng khung đứng cho máy. Làm 2 khung đứng như hình 3.10a.

a) b)
HÌnh 3.10: Khung nhôm đứng (a) và linh kiện nhựa khung đứng (b)
• Lưu ý: Dùng lực vừa phải để siếc chặc ốc tránh dùng lực quá mạnh có thể làm rạn nức hoặc vỡ linh kiện nhựa.
Tiếp theo, dùng linh kiện ghép nối để ghép 2 khung nhôm đứng thành một khung nhôm đứng hoàn chỉnh như hình 3.11. Sau đó ghép khung nhôm đứng và khung nhôm dưới lại để thành một khung máy hoàn chỉnh.

Hình 3.11: Khung nhôm đứng hoàn chỉnh

Hình 3.12: Khung máy đã hoàn chỉnh
Thực hiện ráp trục X, Y, Z
B1: Dùng thanh trượt vuông ráp vào khung dưới máy theo hình để dựng trục Y

Hình 3.13: Thanh trượt vuông
• Lưu ý: Dùng băng dính dán 2 đầu của thanh trượt tránh khi sơ ý làm con trượt rơi ra ngoài.
Sau đó, lắp linh kiện nhựa và động cơ trục Y vào như hình 3.13.1 ( chi tiết phần động cơ xem bước 4 )

Hình 3.13.1: Động cơ trục Y
B2: Lắp trục z và x, thanh ty tròn và ren cắt như hình 3.14

Hình 3.14: Ty ren và Ty tròn
Sau đó dùng linh kiện nhựa trục Z và X, lắp như hình dưới

Hình 3.15: Linh kiện nhựa 2 trục Z, X
Tiếp theo, lắp linh kiện nhựa trục X vào 2 thanh ty tròn để gắn bộ j-head

Hình 3.16: Trục X hoàn chỉnh
• Lưu ý: (1) chỗ để lắp bi trượt lm8uo. (2) chỗ lắp con tán đã quấn băng dính cao su, để con tán không bị trượt ra khỏi linh kiện
B3: Dùng 2 thanh nhôm 15cm(xem lại phần khung máy ) lắp vào dưới khung máy để làm điểm tựa cho giá đỡ động cơ. Đồng thời giúp khung máy giảm sự rung lắc khi hoạt động.
• Lưu ý: Dùng mũi khoan 5li khoan cách đều mỗi bên vào 1cm.
Hình 3.19: Giá đỡ động cơ
Trường hợp đặc biệt: Một số loại giá đỡ động cơ sẽ không phù hợp nên cần phải gia công lại để thích hợp.
hình 3.19. Dùng mỡ bò để bảo quản ty ren và ty tròn không bị oxy hóa.
B4: Lắp puli vào động cơ và gắn vào giá đỡ động cơ
Hình 3.20: puli và động cơ
Sau đó, lắp thanh ty ren vào vị trí trên linh kiên nhựa trục Z và khớp mềm theo hình 3.19. Dùng mỡ bò để bảo quản ty ren và ty tròn không bị oxy hóa.
• Lưu ý: Dùng thước thủy để đo chính xác ty tròn, tránh để nghiêng hay ty tròn không đều 2 bên sẽ ảnh hưởng đến máy khi in.
VII. TEST VÀ HIỆU CHỈNH 3 TRỤC
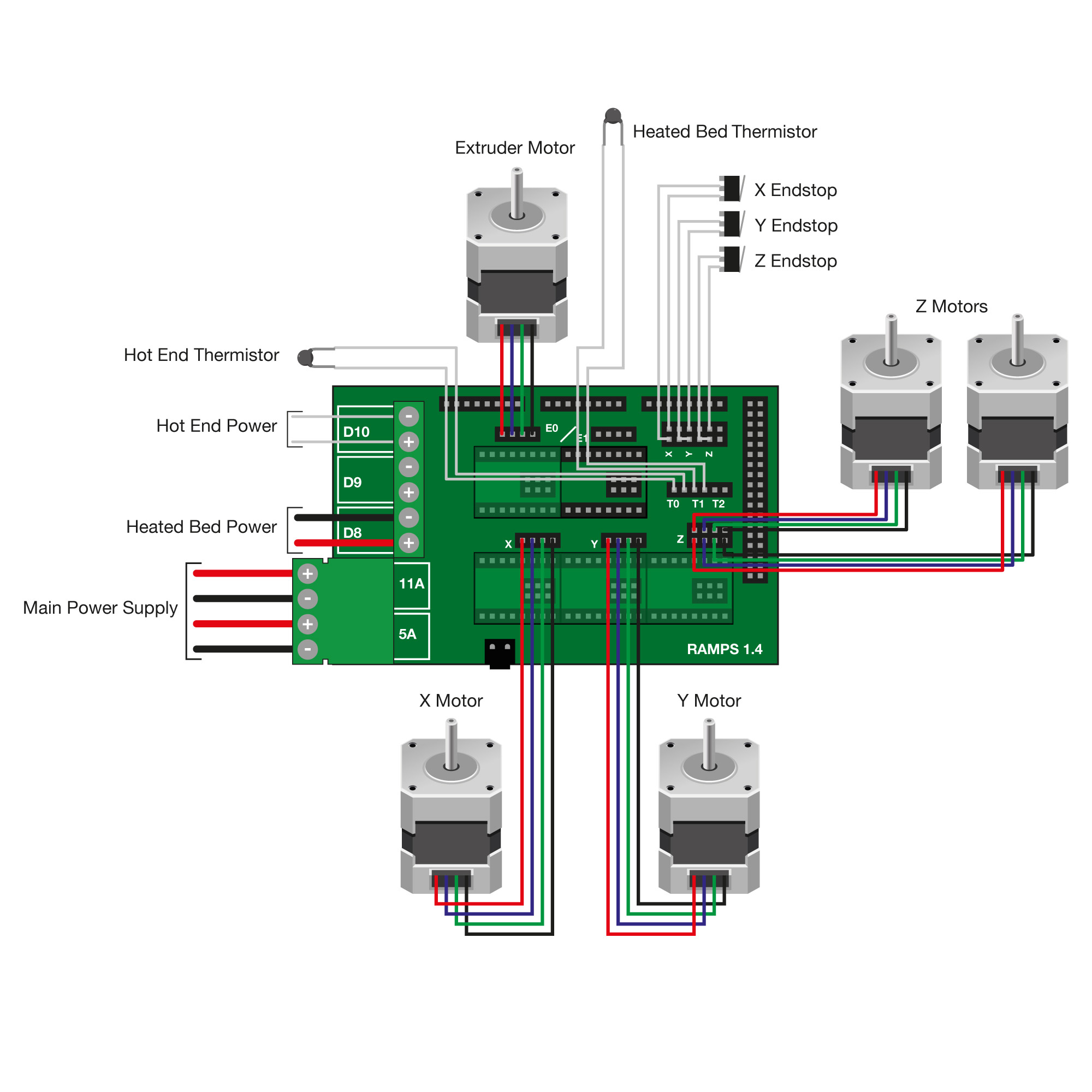
Việc đầu tiên là chúng ta phải lắp các linh kiện điện tử (trước tiên là mạch A4988, động cơ bước, công tắc hành trình, dây nguồn) vào mạch RAMPS và kết nối RAMPS với Arduino. Các bạn chú ý là nên để động cơ bước ở micro step 1/16. Các bạn nối như hình bên dưới.
Riêng về các cảm biến nhiệt, bàn đốt nóng, dây nốt nóng đầu phun, quạt ... chúng ta sẽ cắm vào sau.
Các công tắc hành trình chúng ta chưa cố định ngay, sau khi đã tính toán và chạy thử 3 trục thì chúng ta mới cố định công tắc.
Về cách thức hiệu chỉnh 3 trục thì các bạn theo dõi thêm các video trên internet sẽ rõ hơn. Mình sử dụng ngay firmware Marlin mà chúng ta sẽ dùng cho máy in 3D để test các trục. Các bạn tải về (trong link dropbox của mình) và tìm tới file marlin.ino. Sau khi mở nó sẽ hiện lên rất nhiều tap. Trong tap configuration để chỉnh sửa. Tìm tới dòng lệnh 104-107:
#define TEMP_SENSOR_0 0#define TEMP_SENSOR_1 0#define TEMP_SENSOR_2 0#define TEMP_SENSOR_BED 0
Nếu các bạn để là như thế này có nghĩa là các bạn không sử dụng cảm biến nhiệt độ nào và chúng ta có thể dùng nó để test 3 trục. Tiếp theo cần tìm tới dòng lệnh 477:
#define DEFAULT_AXIS_STEPS_PER_UNIT {100,100,4000,84} // default steps per unit for Ultimaker
Đây là dòng chúng ta sẽ chỉnh số bước của động cơ trên 1 mm. Công thức tính cho trục X và Y là: số step*16/(số răng của puli*2). Động cơ của mình là 200 step*16/(16 răng*2) =100. Với trục Z, ta tính theo bước ren của trục bạn sử dụng. Mình dùng trục 5mm với bước ren 0,8mm nên sẽ có 200*16/0,8 = 4000. Với extruder bạn phải căn cứ vào tỉ lệ các bánh răng mà extruder sử dụng, của mình là loại 38 răng, mỗi răng 1mm nên sẽ có 200*16/38= xấp xỉ 84.
Sau khi đã tính toán xong chúng ta upload vào Arduino.
Bước tiếp theo là cài đặt phần mềm điều khiển và biên dịch G-code.
![[English] ex viết tắt của từ gì? ex là gì? ex nghĩa là gì?](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEhFiRP7spsayG2ppte_20L5qkUrX_HsatNpN8LxoNux1ewEve0IUrCurRVh7VfOvFvrgvnfloMyf_KXZnWfif-BDKLlU5A9zSat0y-Bvu3BeNedpCEJsmMzBTZ-KVRFPfIUZZI60uG8Z5k/s72-c/what-is-ex-meaning.jpg)
![[VI ĐIỀU KHIỂN PIC] - BÀI 6: TIMER/COUNTER CỦA PIC TRONG CCS](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEjCz787KDILJfZRV78M_FwKV1KfpbML6oDxg3VEpJgu0t0RJY02ANCf7h2BeqkgD5UgoufjwXLnxGh8Hj1RlBnjlkQYUBrrjUwObg3Ru4lGv0Slpmf1xEjvDJMp5sg425Oaoc_NCuUFqow/s72-c-d/pic-microcontrollers-examples-in-assembly-language-chapter-04-fig4-1.gif)
![[VI ĐIỀU KHIỂN PIC] - BÀI 7: ANALOG (ADC) CỦA PIC TRONG CCS](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEiUKGTlRMrOPiQlrL-hvj4au7WA4MEdUChYe_L6bH5mOIDDBpmEBaW_oIKQYz04kfHKY2FmcWb8urcsZgPXMNp5r4ZHqskRjbYNp12JvklYcXHrnweaizv7lKPyribPyxWtsUNzggwXfOI/s72-c/04-06-2017+10-28-24+PM.png)
![[VI ĐIỀU KHIỂN PIC***] - BÀI TẬP MẪU ĐẶC BIỆT CỦA VI ĐIỀU KHIỂN PIC16F877A](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEjeSJllTzabiuuA-Zd8LVZY9urJdd-InM0cVOkJtiqrwHcEGJQIajPm7BoERinwbHbEJ2fzFN_P49llQiqF-KyGMuY9NkP5HdA31GAcfcG4WjHdZl2RDngNbMNjts3gpkgib5sVR01eeKc/s72-c/1.png)
![[VI ĐIỀU KHIỂN PIC] - BÀI 9: KHỞI TẠO PWM TRONG PIC 16F877A VỚI CCS](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEjerTKUiWHBBUrmBbbOQILAmqhC73Ubt_nYZR9fSu1FCPX2aXz59Ir4kJRIkpphvjOK_Aljt1NCDqHct6fmoeX8JomWvOu06OkZ7fYQvK975ftMf1J4kP8iYpX6P9tPo3NmiSXTS_vUjRY/s72-c/10-06-2017+11-40-42+PM.png)

![[VI ĐIỀU KHIỂN PIC] - BÀI 8: GIAO TIẾP LM35 PIC16F877A TRONG CCS](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEgf6kgYQjVzdLTbPiEhjagyXQbubtwplknQ3H2kdg-7T6Di-5_oIpvAGdP3W4DL9sKeSUktz35CKibzHAz7j0eZI5sp1kGnbTYT5bBoy0P7Xv-RPxmUC_SXC9FkrCXS4Kdc3Ob1E7cI0eI/s72-c/HH.png)
![[Research] Cách viết và cấu trúc chi tiết một bài báo khoa học](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEiK5FSwIEKPC-QCKmUI_fsFHf3mhlU4GnKEgYQ5vo6SnFVhgOb9iR4_1pCRXk8kuKCQuh9m8xZGH8nDQGO-gsAq5IhT1t5wpHfN3iTLtN45k1UeNG36d1QhMPHPLgpJQntMRPIjb2vwI-0/s72-c/Picture5.jpg)
